STEP 7‑Micro/WIN SMART编程软件
v2.7 官方免费版- 软件大小:631 MB
- 软件语言:简体中文
- 更新时间:2023-11-22
- 软件类型:国产软件 / 机械电子
- 运行环境:WinXP, Win7, Win8, Win10, WinAll
- 软件授权:免费软件
- 官方主页:
- 软件等级 :
- 介绍说明
- 下载地址
- 精品推荐
- 相关软件
- 网友评论
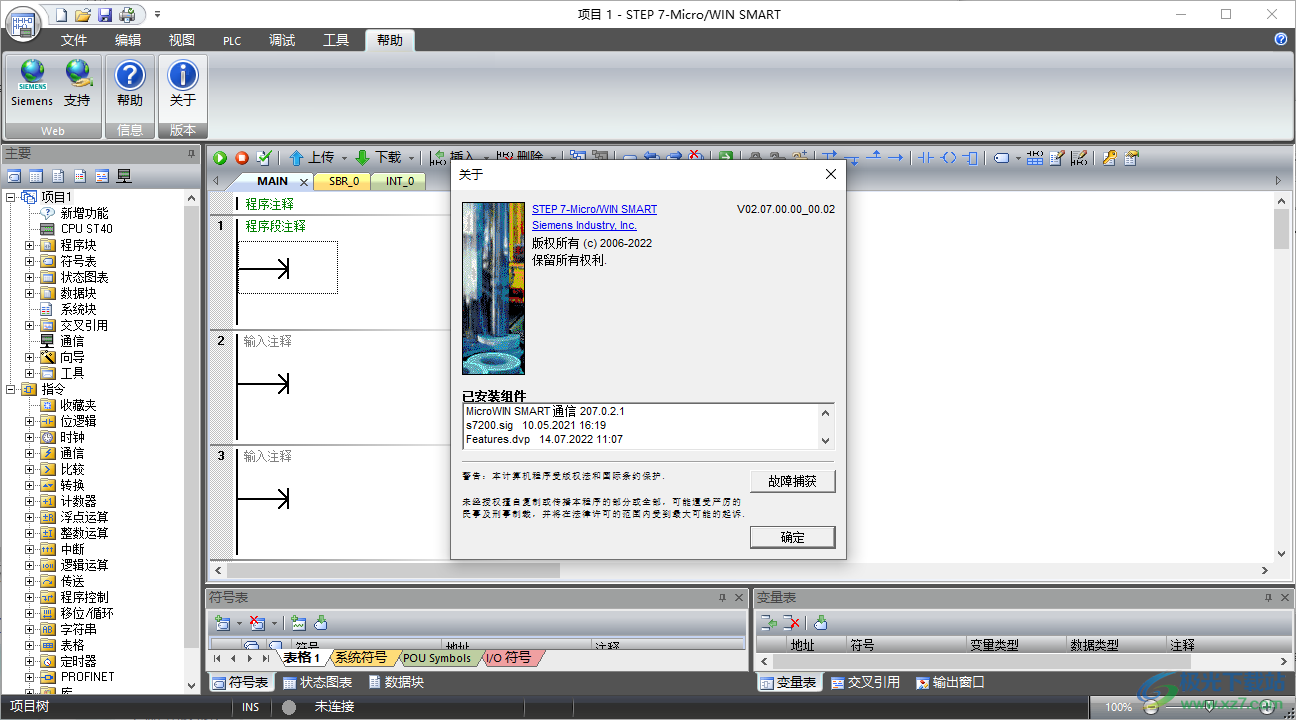
MicroWIN
SMART2.7提供设备编程功能,如果你需要为设备添加新的功能模块就可以在这款软件上执行PLC控制编程,软件界面提供非常多的功能和指令,可以在设计区域随意增加新的PLC指令,支持比较、转换、计数器、浮点运算、整数运算、中断、逻辑运算、传送、程序控制、移位循环、字符串等内容添加,添加完毕就可以在软件上调试编程结果,可以在软件执行多次查看结果,可以对执行过程的图表状态查看,开始持续监视状态图表中的变量,测试完毕可以下载PLC到设备使用。
 编程软件">
编程软件">软件功能
S7-200 SMART V2.7 中的新增内容
只有固件版本为 V2.7 的以下 CPU 型号支持本章所述的新功能:
受固件 V2.7 影响的 CPU 型号

说明
固件版本为 V2.7 的 CPU 型号不能降级到 V2.6 或任何以前的版本。
说明
先前订货号以 0AA0 结尾的任何 SR 或 ST 型号都不能升级到 V2.7。
订货号以 0AA1 结尾的 CPU 型号不能降级为任何之前的固件版本。
STEP 7‑Micro/WIN SMART V2.7 版本提供了以下新功能:
1、运动轴组
STEP 7‑Micro/WIN SMART V2.7 和 S7-200 SMART V2.7 CPU 固件支持对 2D/3D 直线插补运动进行基于 PTO(脉冲串输出)的开环运动控制。
2、2D/3D 直线插补运动
使用运动向导组态轴组和生成 POU(程序组织单元),命令轴组从实际位置到绝对或相对目标位置的 2D/3D 直线插补运动。
3、运动路径
使用运动向导组态轴组和生成 POU,以命令轴组按照多线段组态中指定的路径运动。
4、超驰
超驰功能为运动轴提供运动增强。如果其它运动控制命令运行时某个轴又启动一个新的运动控制命令,则在现有命令全部执行完成前,新命令将超驰已激活的命令。
5、用户自定义 Web 页面
STEP 7‑Micro/WIN SMART V2.7 和 S7-200 SMART V2.7 CPU 固件增加了 Web 服务器用户自定义 Web 页面功能。
利用 SMART Web Editor 工具,用户可创建用户自定义 Web 页面项目,并将该项目下载到 Web 服务器中。
6、Web API(应用程序编程接口)
STEP 7‑Micro/WIN SMART V2.7 和 S7-200 SMART V2.7 CPU 固件增加了 Web API 功能,为用户提供了从终端设备读取和写入 CPU 数据的接口。
软件特色
S7-200 SMART 可实现 CPU、编程设备和 HMI 之间的多种通信:
以太网:
编程设备到 CPU 的数据交换
HMI 与 CPU 间的数据交换
S7 与其它 S7-200 SMART CPU 的对等通信
与其它具有以太网功能的设备间的开放式用户通信 (OUC)
使用 PROFINET 设备的 PROFINET 通信
智能设备组态
PROFINET 向导提供将 CPU 角色选为智能设备的功能。
GSDML 文件导出
PROFINET 向导提供导出 GSDML 文件的功能。
PROFINET 智能设备的 LED 状态
LED 状态指示灯显示 PROFINET 智能设备的信息。
智能设备诊断
PROFINET 智能设备提供诊断功能。
状态图
PROFINET 智能设备提供状态图功能。
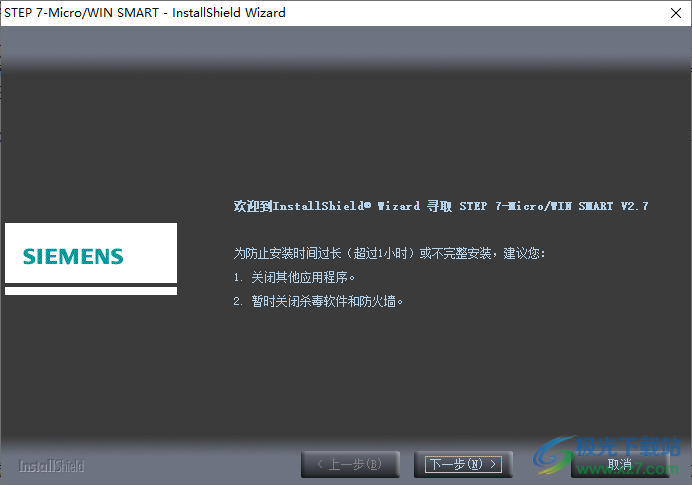
安装方法
1、将STEP 7‑Micro/WIN SMART直接安装到电脑,点击下一步
2、提示软件的安装地址设置,可以默认安装在C盘

3、显示软件的安装进度条,等等全部内容安装到电脑

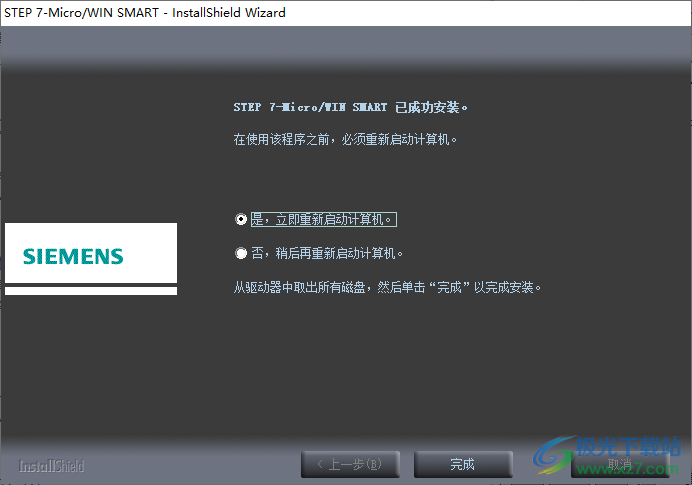
4、STEP 7‑Micro/WIN SMART已经安装结束,可以直接重启电脑
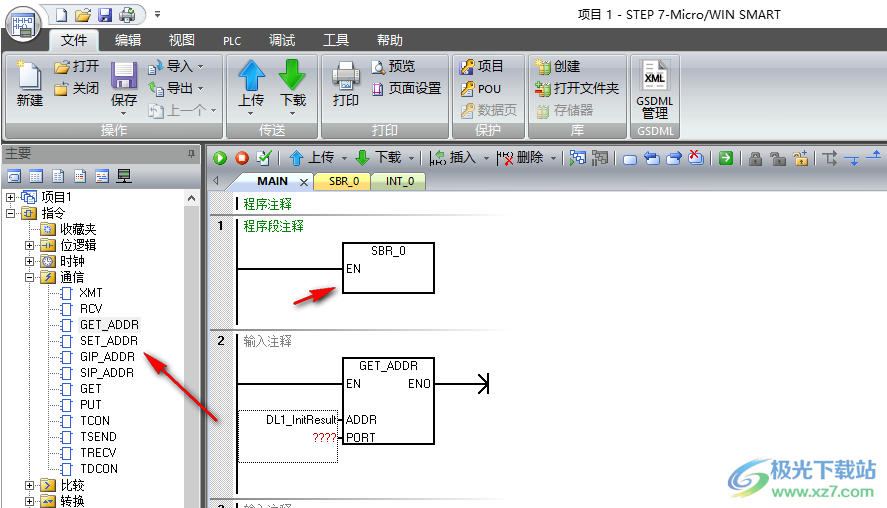
5、进入STEP 7‑Micro/WIN SMART就可以开始设计内容,可以添加控制功能
6、通讯功能添加:XMT、RCV、GET ADDR、SET_ADDR、GIP ADDR、SIP ADDR
官方教程
对 PLC 和打开的项目进行比较
在 PLC 中监控程序数据值
要对 STEP 7-Micro/WIN SMART 项目组件与 PLC 进行比较,在 PLC 菜单功能区的“信息”(Information) 区域单击“比较”(Compare) 按钮。
在“比较”(Compare) 对话框中,选中要进行比较的项目组件的复选框。 在 STEP 7-Micro/WIN SMART 程序编辑器中当前打开的项目与 CPU 所含项目之间进行比较。

在 STOP 模式下写入和强制输出
对 PLC 和打开的项目进行比较
如何监视和调试程序
要在 STOP 模式下启用“写入”(Write) 和“强制”(Force) 功能,在“调试”(Debug) 菜单功能区的“设置”(Settings) 区域单击“STOP 模式下强制”(Force in Stop) 按钮。
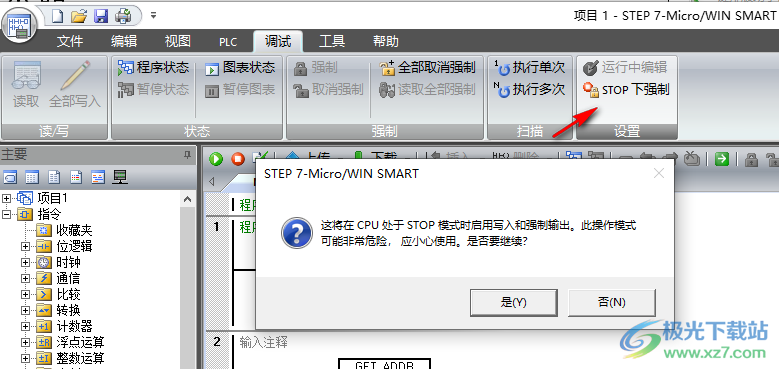
S7-200 SMART PLC 支持在 PLC 处于 STOP 模式时写入和强制输出(模拟量和数字量)。但作为一项安全防范措施,必须在 STEP 7-Micro/WIN SMART 中通过“STOP 模式下强制”(Force in Stop) 设置专门启用此功能。
警告
写入或强制输出对过程设备的影响
如果在写入或强制输出时已将 S7-200 SMART PLC 连接到过程设备,则 PLC 可将这些更改传送到该设备。这将导致设备内出现异常,进而导致人员死亡或重伤和/或财产损失。
仅当确保过程设备可以安全接受相关变更时,再执行写入和强制输出操作。
默认情况下,STEP 7-Micro/WIN SMART 不会启用“STOP 模式下强制”(Force in STOP)。PLC 处于 STOP 模式时,STEP 7-Micro/WIN SMART 会防止用户写入或强制输出。单击“调试”(Debug) 菜单中的“STOP 模式下强制”(Force in STOP) 按钮,会针对当前项目的当前编辑会话启用写入和强制功能。打开其它项目时,“STOP 模式下强制”(Force in STOP) 返回其默认状态,STEP 7-Micro/WIN SMART 会防止用户在 PLC 处于 STOP 模式时写入和强制输出地址。
状态 LED 用于指示 CPU 在 STOP 模式下是否有强制数据。
编译项目
使用以下方法之一编译 STEP 7-Micro/WIN SMART 项目:
在 PLC 菜单的“操作”(Operation) 区域单击“编译”(Compile) 按钮。
在程序编辑器中单击“编译”(Compile) 按钮
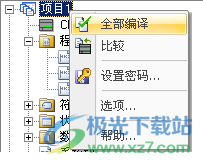
在项目树中右键单击项目名称、“程序块”(Program Block) 文件夹、“数据块”(Data Block) 文件夹或“系统块”(System Block) 文件夹,然后在快捷菜单中选择“全部编译”(Compile All) 命令。
STEP 7‑Micro/WIN SMART 在输出窗口显示编译结果,包括程序块和数据块的大小。
创建子例程
使用子例程
默认情况下,STEP 7‑Micro/WIN SMART 会在项目中提供一个子例程。 如果不需要,可将其删除,也可用其来对子例程编程。
要创建新的子例程,可使用下列方法之一:
在“编辑”(Edit) 菜单功能区的“插入”(Insert) 区域,单击“对象”(Object) 下拉列表按钮,然后选择“子例程”(Subroutine)。
在项目树中,右键单击“程序块”(Program Block) 图标,然后从上下文菜单中选择“插入 > 子例程”(Insert > Subroutine)。
在程序编辑器窗口中右键单击,然后从上下文菜单中选择“插入 > 子程序”(Insert > Subroutine)。
程序编辑器显示新建的空子例程。 程序编辑器底部显示一个新选项卡,代表新子例程。 项目树也在“程序块”(Program Block) 文件夹中包括新的子例程。
此时可处理新的子例程,也可暂时先不处理,而返回先前处理的 POU。
如果要在此时分配子例程的参数,可使用该子例程的变量表进行定义。
说明
请记住,程序中每个 POU 都有一个单独的变量表。 必须在选中此子例程的选项卡时出现的变量表中为此子例程定义局部变量。 编辑变量表时,确保已选择相应选项卡。
每个子例程调用的输入/输出参数的最大限制是 16。如果尝试下载一个超出此项限制的程序,下载操作返回错误。
如果要在选中子例程的选项卡时为其写入逻辑,只需在程序编辑器窗口中开始操作。
如果要处理其它 POU,单击该 POU 的选项卡将其显示在程序编辑器窗口中。
定义子例程参数
子例程可能包含传递的参数。 在子例程的变量表中定义参数。参数必须具有符号名(最多 23 个字符)、变量类型和数据类型。 最多可与子例程之间传递十六个参数。
变量表中的变量类型字段定义参数是传入子例程 (IN)、传入和传出子例程 (IN_OUT) 还是传出子例程 (OUT)。下表说明了子例程的参数类型。 要添加参数条目,可右键单击要添加的类型(IN、IN_OUT 或 OUT)的变量类型字段。 从快捷菜单选择“插入 > 行”(Insert > Row)。 STEP 7‑Micro/WIN SMART 将所选类型的另一参数条目插在当前条目上方。
调用参数类型:
IN:参数传入子例程。如果参数是直接地址(例如 VB10),则指定位置的值传入子例程。如果参数是间接地址(例如 *AC1),则指针指代位置的值传入子例程。 如果参数是数据常数 (16#1234) 或地址 (&VB100),常数或地址值传入子例程。
IN_OUT:位于指定参数位置的值传入子例程,来自子例程的结果值返回至相同的位置。常数(例如 16#1234)和地址(例如 &VB100)不允许用作输入/输出参数。
OUT:子例程的结果值返回至指定参数位置。 常数(例如 16#1234)和地址(例如 &VB100)不允许用作输出。
TEMP:未用于传递参数的任何局部存储器可用于子例程中的临时存储。
变量表中的数据类型字段定义参数的大小和格式。 下表列出了参数类型。
参数数据类型
BOOL:此数据类型用于单个位输入和输出。 示例中的 IN3 是布尔输入。
如果首个输入为布尔输入,则其可以是能流。 能流作为输入,是基于位逻辑指令组合的能流结果。在局部变量表中,布尔能流输入必须位于其它类型输入之前。只有输入参数可以这样使用。下例中的使能输入 (EN) 和 IN1 输入使用布尔逻辑。
BYTE、WORD、DWORD:这些数据类型分别标识 1、2 或 4 个字节的不带符号的输入或输出参数。
INT,DINT:这些数据类型分别标识 2 或 4 个字节的带符号的输入或输出参数。
REAL :该数据类型标识单精度(4 个字节)IEEE 浮点数值。
STRING :此数据类型用作字符串的四字节指针
下载地址
- Pc版
STEP 7‑Micro/WIN SMART编程软件 v2.7 官方免费版
本类排名
本类推荐








装机必备
换一批






















- 聊天
- qq电脑版
- 微信电脑版
- yy语音
- skype
- 视频
- 腾讯视频
- 爱奇艺
- 优酷视频
- 芒果tv
- 剪辑
- 爱剪辑
- 剪映
- 会声会影
- adobe premiere
- 音乐
- qq音乐
- 网易云音乐
- 酷狗音乐
- 酷我音乐
- 浏览器
- 360浏览器
- 谷歌浏览器
- 火狐浏览器
- ie浏览器
- 办公
- 钉钉
- 企业微信
- wps
- office
- 输入法
- 搜狗输入法
- qq输入法
- 五笔输入法
- 讯飞输入法
- 压缩
- 360压缩
- winrar
- winzip
- 7z解压软件
- 翻译
- 谷歌翻译
- 百度翻译
- 金山翻译
- 英译汉软件
- 杀毒
- 360杀毒
- 360安全卫士
- 火绒软件
- 腾讯电脑管家
- p图
- 美图秀秀
- photoshop
- 光影魔术手
- lightroom
- 编程
- python
- c语言软件
- java开发工具
- vc6.0
- 网盘
- 百度网盘
- 阿里云盘
- 115网盘
- 天翼云盘
- 下载
- 迅雷
- qq旋风
- 电驴
- utorrent
- 证券
- 华泰证券
- 广发证券
- 方正证券
- 西南证券
- 邮箱
- qq邮箱
- outlook
- 阿里邮箱
- icloud
- 驱动
- 驱动精灵
- 驱动人生
- 网卡驱动
- 打印机驱动



网友评论